FIR / IIR Filters
Finite and Infinite Digital Filters
A Digital Filter is a basic building block DIGITAL SIGNAL PROCESSING Systems.
Platforms
Availability
| Platforms |
| Arm Devices Armv7-A Cortex-A8 / A9 / A15 |
ADT FIR/IIR is available on the above Platforms: Other configurations are available upon request.
Description
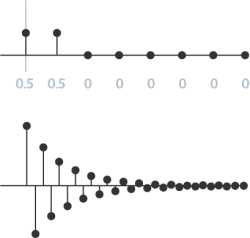
Infinite impulse response (IIR) filters
IIR filters are digital filters with infinite impulse response, which have both poles and zeros. IIR filters typically meet a given set of specifications with a much lower filter order than a corresponding FIR filter. Therefore, generally IIR filters are more efficient in memory and computational requirements than FIR filters. A drawback of IIR filters is that they have non-linear phase responses.
Finite impulse response (FIR) filters
FIR filters are also known as convolution filters, or moving-average filters because the output values of an FIR filter are described as a finite convolution. FIR filters have only zeros (no poles). FIR filters can have linear phase characteristics, which are desirable in many applications.
Specification Tables
NOTE: We specify MIPS (Millions of Instructions Per Second) as MCPS (Millions of Instruction Cycles Per Second). Unless otherwise specified, peak MIPS are indicated.
↓ Click on links below to view specification tables.
ARM Devices
ARM Cortex-A8 / A9 / A15
CPU UTILIZATION & MEMORY REQUIREMENTSAll Memory usage is given in units of byte
| Function | MIPS per Channel | Program Memory | Data Memory | Per-Channel Data Memory |
| IIR* Filter | 2.4 | 3264 | — | 644 |
| FIR* Filter | 21 | 2848 | — | 8196 |
*IIR Note:
MIPS is based upon a 4th-order IIR filter, a frame size of 100 samples, 8 kHz sampling rate.
*FIR Note:
MIPS is based upon a FIR filter of 93 filter coefficients, a frame size of 100 samples, 8 kHz sampling rate.
API Functions
API function call summary
InitFIRFilter(…) FIRFilter(…)
InitIIRFilter(…) IIRFilter(…)